
Kenta Yokoe
Research
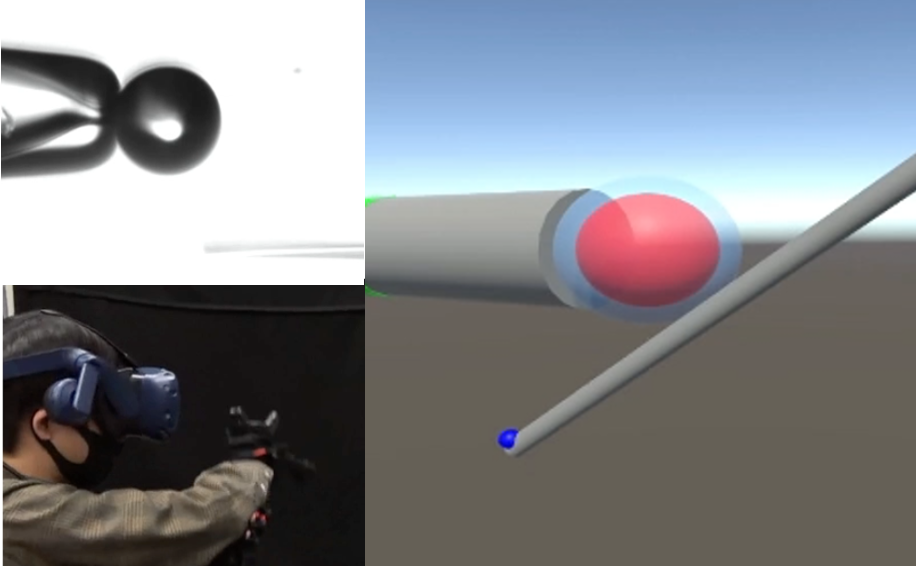

Immersive Micromanipulation System
We are developing operation interfaces that enable easy micromanipulation by immersing users in the micro world using virtual reality and mixed reality technologies. Our goal is to create a system that allows even beginners to perform micromanipulation tasks with ease.
References
- K. Yokoe, T. Aoyama, T. Fujishiro, M. Takeuchi and Y. Hasegawa, "An immersive micro-manipulation system using real-time 3D imaging microscope and 3D operation interface for high-speed and accurate micro-manipulation," ROBOMECH Journal, vol. 9, no. 16, Jun. 2022. ROBOMECH Journal Best Paper
- K. Yokoe, S. Saito, Y. Funabora, T. Isomura, and T. Aoyama, "McKibben-Based Haptic Sensations for Reducing Cognitive Workload in Immersive Micromanipulation," in Proc. 2026 IEEE 9th International Conference on Soft Robotics (RoboSoft), Apr. 2026, pp. 338-339.
- K. Yokoe, T. Aoyama, Y. Funabora, M. Takeuchi, and Y. Hasegawa, "Mixed-Reality-Based Immersive Micromanipulation System for Teleoperation and Collaborative Operation," in Proc. SICE Annual Conference 2022, Sep. 2022, pp. 1238–1239.
- K. Yokoe, T. Aoyama, T. Fujishiro, M. Takeuchi, and Y. Hasegawa, "High-Speed and High-Accuracy Immersive Micro Manipulation System Using 3D Imaging Microscope and Glove-Type Operation Interfaces," in Proc. 2021 IEEE International Conference on Advanced Robotics and Its Social Impacts, Jul. 2021.
- K. Yokoe, T. Aoyama, T. Fujishiro, M. Takeuchi, and Y. Hasegawa, "Immersive Micromanipulation System Using Real-Time 3D Imaging Microscope and Glove-Type Operation Interfaces," ROBOMECH 2021, Jun. 2021. JSME Young Engineers Fellow Award
Postural Guidance in Immersive Environments Using Wearable Haptic Device
We are developing wearable haptic devices for postural guidance of the torso. These devices can provide directional sense to users in immersive spaces even without visual information.
References
- K. Yokoe, T. Aoyama, Y. Funabora, M. Takeuchi and Y. Hasegawa, "Intuitive Directional Sense Presentation to the Torso Using McKibben-Based Surface Haptic Sensation in Immersive Space," IEEE Transactions on Haptics, vol. 18, no. 1, pp. 244-254, Dec. 2024.
- K. Yokoe, T. Aoyama, Y. Funabora, M. Takeuchi, and Y. Hasegawa, "Wearable Fabric Actuator Inducing Shoulder Movements for Directional Guidance of Hand Movements," in Proc. 2024 IEEE International Conference on Cyborg and Bionic Systems, Nov. 2024.
- K. Yokoe, T. Aoyama, Y. Funabora, K. Nakagawa, Y. Sakai, M. Takeuchi, and Y. Hasegawa, "Control Method of Fabric Actuator Suit for Gaze Guidance in Immersive Spaces," in Proc. 2022 International Symposium on Micro-NanoMechatronics and Human Science, 2022. Best Paper Award
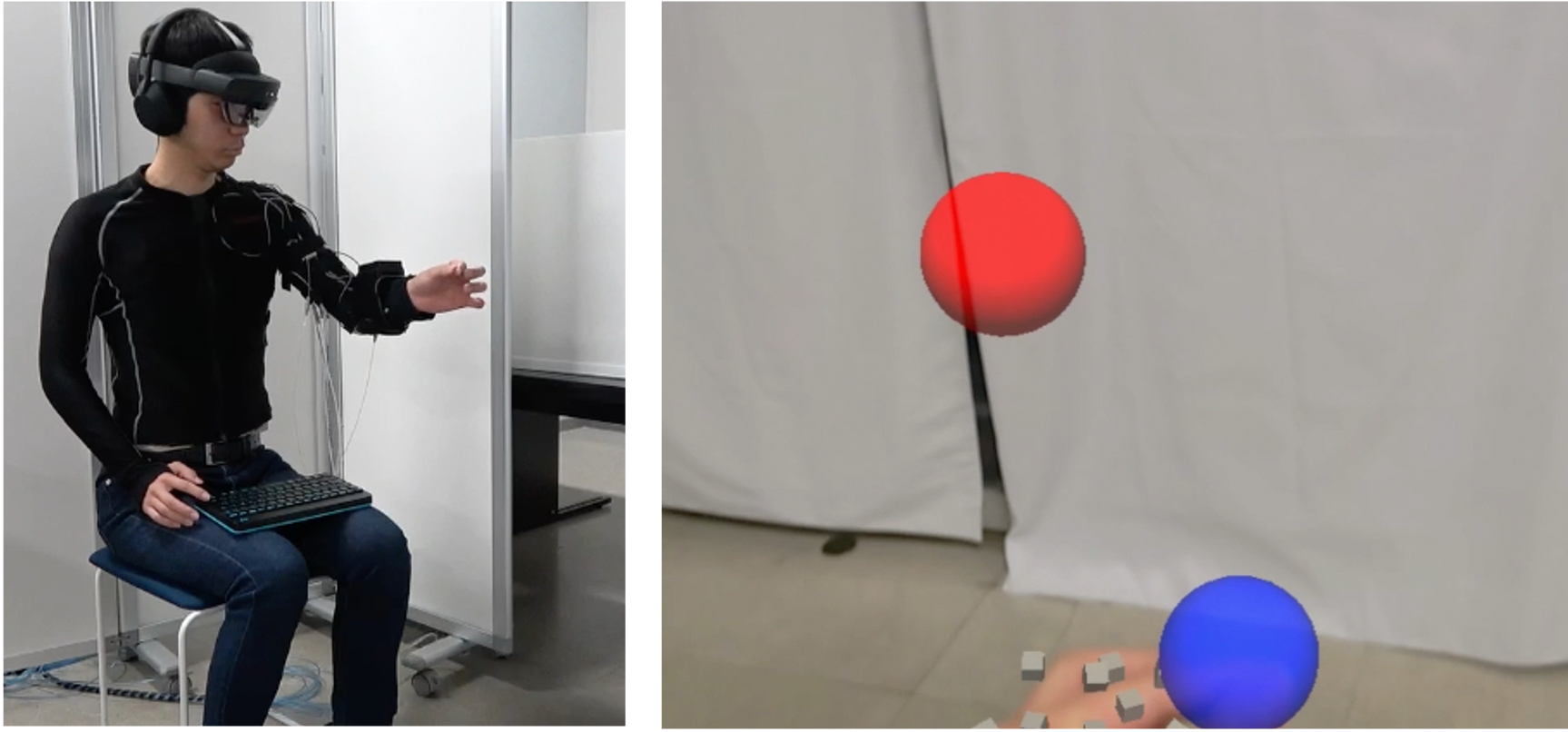
Hand Positional Guidance in Immersive Environments Using Wearable Haptic Device
We are developing wearable haptic devices for hand positional guidance. These devices can provide hand position information to users in immersive spaces even without visual information.
References
- K. Yokoe, Y. Funabora, and T. Aoyama, "Intuitive Hand Positional Guidance Using McKibben-Based Surface Tactile Sensations to Shoulder and Elbow," IEEE Robotics and Automation Letters, vol. 10, no. 4, pp. 3254–3261, Feb. 2025.
- K. Yokoe, Y. Funabora, and T. Aoyama, "Intuitive Hand Positional Guidance Using McKibben-Based Surface Tactile Sensations to Shoulder and Elbow," in Proc. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2025. SICE International Young Authors Award
- K. Yokoe, T. Aoyama, Y. Funabora, M. Takeuchi, and Y. Hasegawa, "Elbow Angle Guidance System Based on Surface Haptic Sensations Elicited by Lightweight Wearable Fabric Actuator," in Proc. 2024 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Jul. 2024, pp. 1447–1454.
- K. Yokoe, T. Aoyama, Y. Funabora, M. Takeuchi, and Y. Hasegawa, "Shoulder-Wearable Fabric Actuator for Directional Sensations," in Proc. 2023 International Symposium on Micro-NanoMechatronics and Human Science, Nov. 2023. Best Paper Award
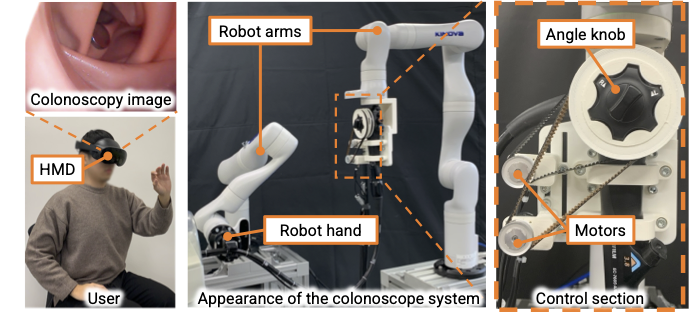
Immersive Colonoscopy System
We are developing an examination system that uses head movements to control the pan and tilt of a colonoscope, with the video projected onto a Head Mounted Display (HMD). This system aims to simplify endoscope operation and reduce the workload on practitioners.
References
- K. Yokoe, T. Ito and T. Aoyama, "Immersive Operation Interface to Simplify Colonoscopy Using Head and Hand Motion," in Proc. 36th 2025 International Symposium on Micro-NanoMechatronics and Human Science, Nov. 2025. Best Paper Award
- T. Ito, T. Aoyama, K. Yokoe, T. Yamamura, M. Hiramatsu, H. Kawashima, M. Takeuchi, and Y. Hasegawa, "Head-Movement Controlled Colonoscope Interface with Head Mounted Display for Simplified the Pan and Tilt Operation," in Proc. 35th 2024 International Symposium on Micro-NanoMechatronics and Human Science, Nov. 2024.
Biography
- April 2017 - March 2021 Bachelor's Course, Department of Mechanical and Aerospace Engineering, Nagoya University
- April 2021 - March 2023 Master's Course, Department of Micro-Nano Mechanical Science and Engineering, Graduate School of Engineering, Nagoya University
- April 2023 - May 2025 Doctoral Course, Department of Micro-Nano Mechanical Science and Engineering, Graduate School of Engineering, Nagoya University
- April 2023 - May 2025 JSPS Research Fellow (DC1)
- June 2025 - July 2025 JSPS Research Fellow (PD)
- August 2025 - Present Assistant Professor, Department of Mechanical Systems Engineering, Graduate School of Engineering, Nagoya University
Peer-Reviewed Journal Papers
International Conference
Domestic Conference
Workshop
Awards
Grants
Memberships
- IEEE
- IEEE Robotics and Automation Society
- The Japan Society of Mechanical Engineers
- The Society of Instrument and Control Engineers
- ACM SIGCHI
Committee Service
- January 2026 - December 2028 Committee Member, SICE Chubu Chapter
- April 2026 - December 2026 Chair, Organizational Operations Committee, 27th SICE System Integration Division Conference (SI2026)
- August 2025 - November 2025 Local Arrangement Co-Chairs of 35th 2025 International Symposium on Micro-NanoMechatronics and Human Science
Contact
1 Furo-cho, Chikusa-ku, Nagoya 464-8603, Japan
Cyber Robotics Laboratory
Department of Mechanical Systems Engineering
Graduate School of Engineering, Nagoya University
Email: yokoe [at] nagoya-u.jp